A major focus of research in the lower limb prosthesis area is providing powered joint actuation. The recent development in robotic lower-limb prostheses has helped amputees’ energetic locomotion requirements. It thus offers higher performance in restoring the lost-limb functions than commercially available passive prostheses. However, robotic knee prostheses and ankle prostheses are always considered standalone prosthetic joints despite having their common purpose of restoring biological limb joint functions for lower-limb amputees. Considering this identical objective and leveraging the lower limb design similarities, this paper presents the continuation of the unified design approach. The new idea essentially adopts a Common Core Components Knee-Ankle Prosthesis Design. This research aims to target the robotic knee-ankle joint design unification as a major goal while fulfilling their biomechanical requirements, especially the torque, speed, range of motion, and form factor requirements associated with the knee-ankle joints. Based on such needs, a unified knee/ankle joint named A-leg (Alabama-Leg) was developed, which features a similar structural and actuation mechanism while still providing the desired level of flexibility to customize joint-specific parts where necessary. Moreover, a significant contribution has been made in designing and characterizing new transmission systems to improve the performance of actuators.

SKILLS DEVELOPED
PROJECT MEDIA

Powered Knee Joint

Powered Ankle Joint
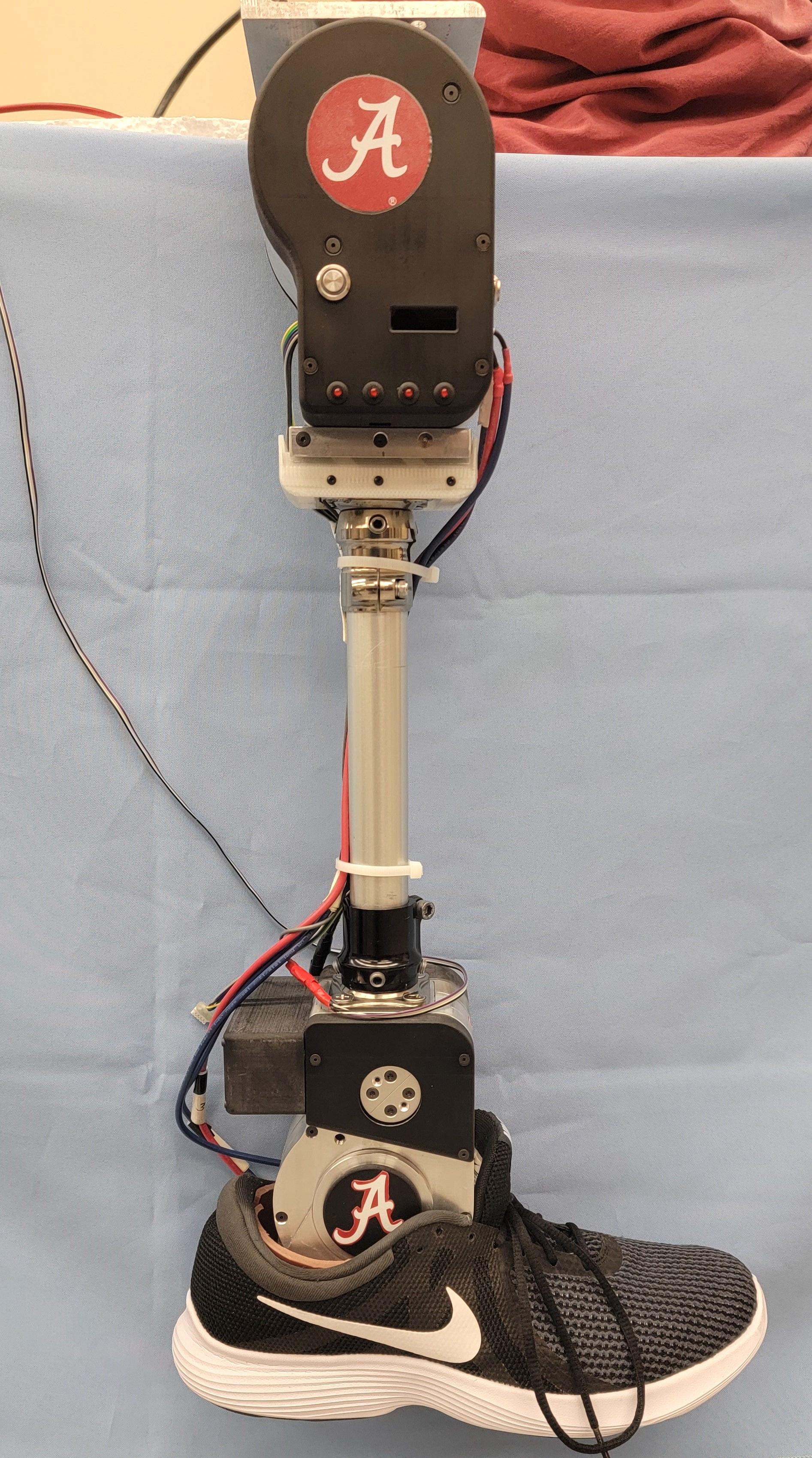
Powered Knee and Ankle Joint
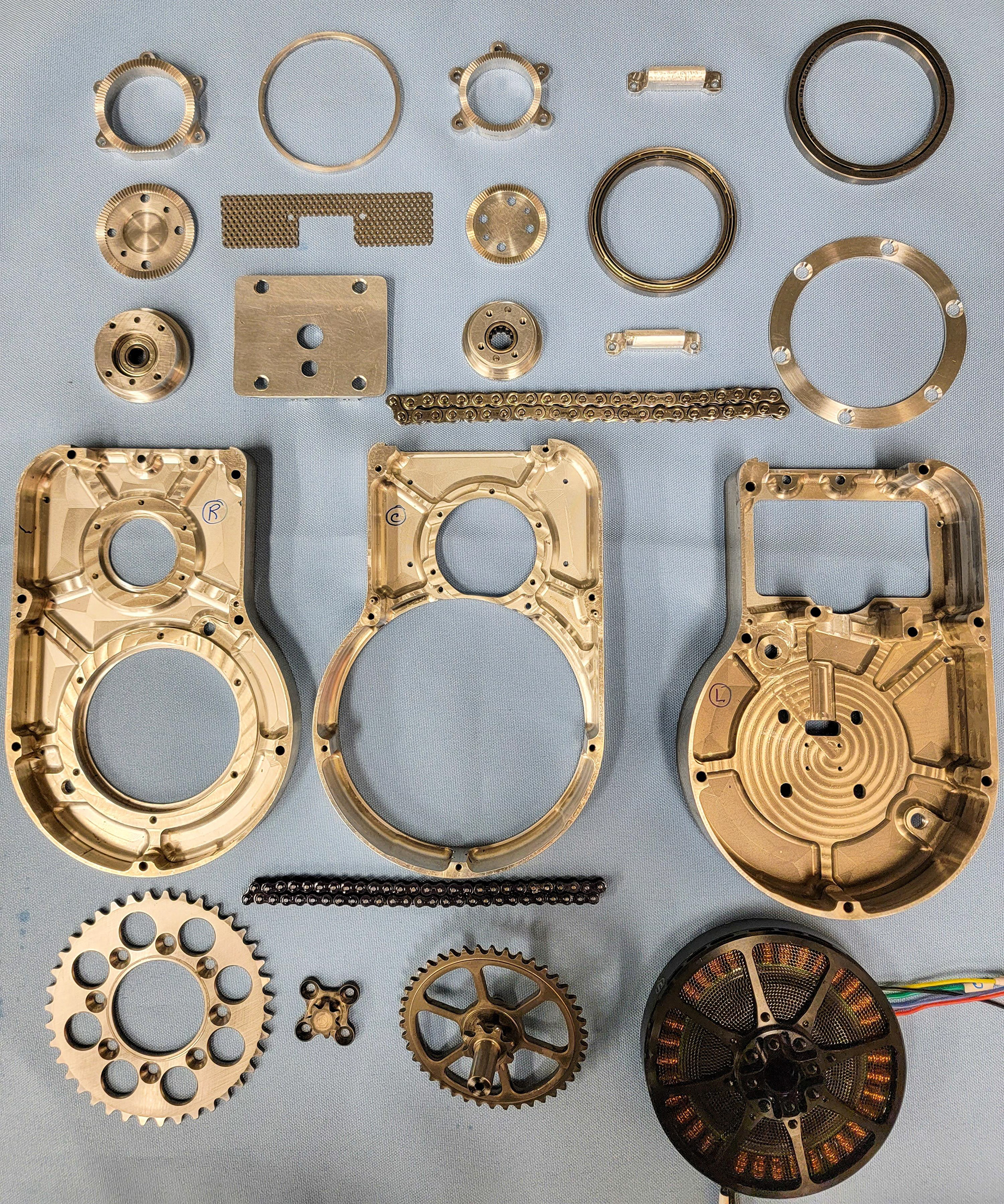
Common Core Components of Knee and Ankle Joint
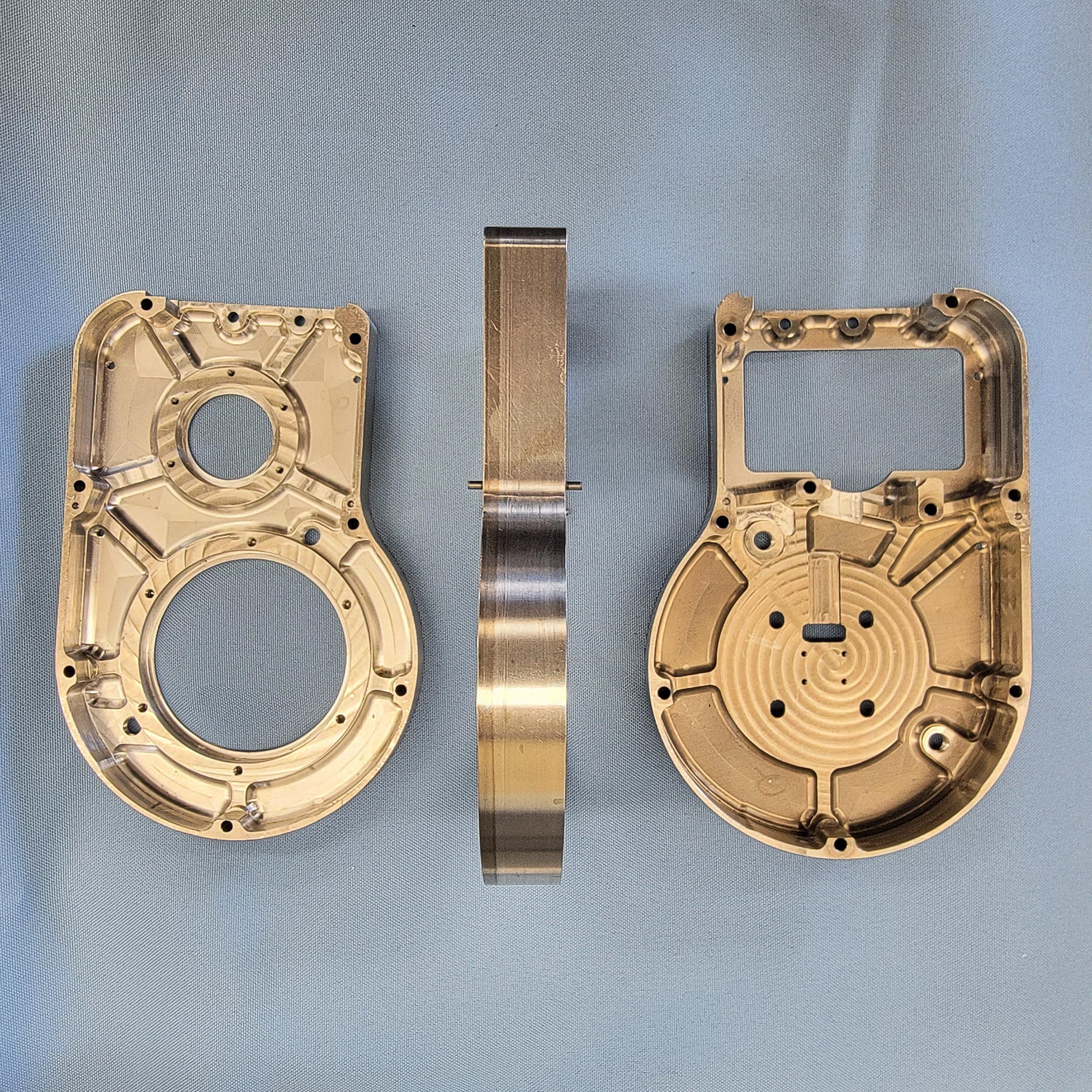
Clamshell Design
Benchtop Testing

50th Percentile Male (Left) and Female (Right) with A-Leg
Testing at Slow Walking Speed
Testing at Fast Walking Speed