The research in this project, aimed at helping mobility-impaired individuals, proposes a novel robotic platform with quadrupedal locomotion. With motorized actuation, the quadruped robotic platform can accompany the user at the center, providing protection and walking assistance if needed. Due to its legged locomotion, the robotic platform can expand the user's accessible environments, including both indoor flat floors and outdoor uneven terrain. It can even assist users in mobility-challenging activities, such as climbing stairs.
PROJECT MEDIA


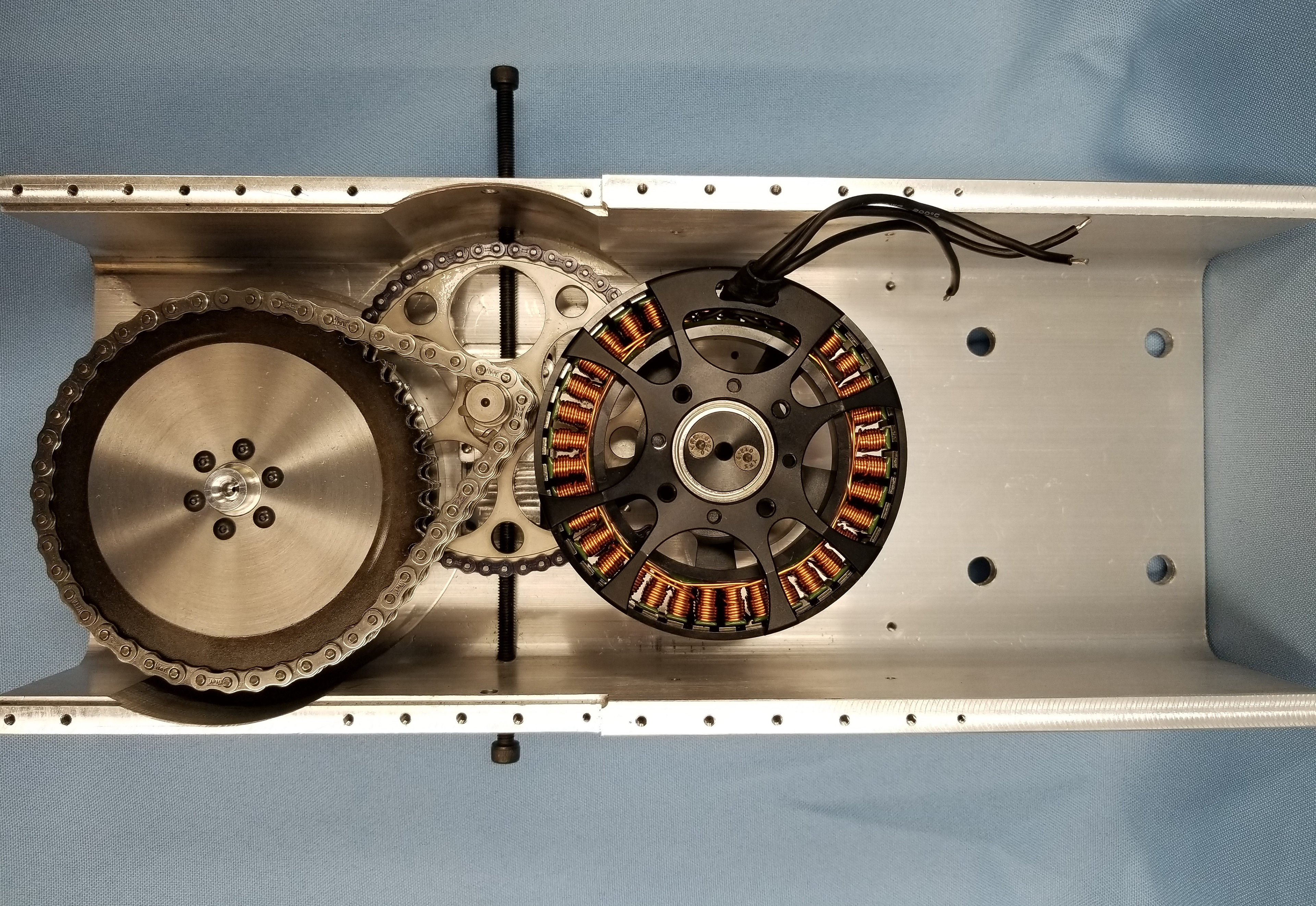
Custom Chain Drive Mechanism
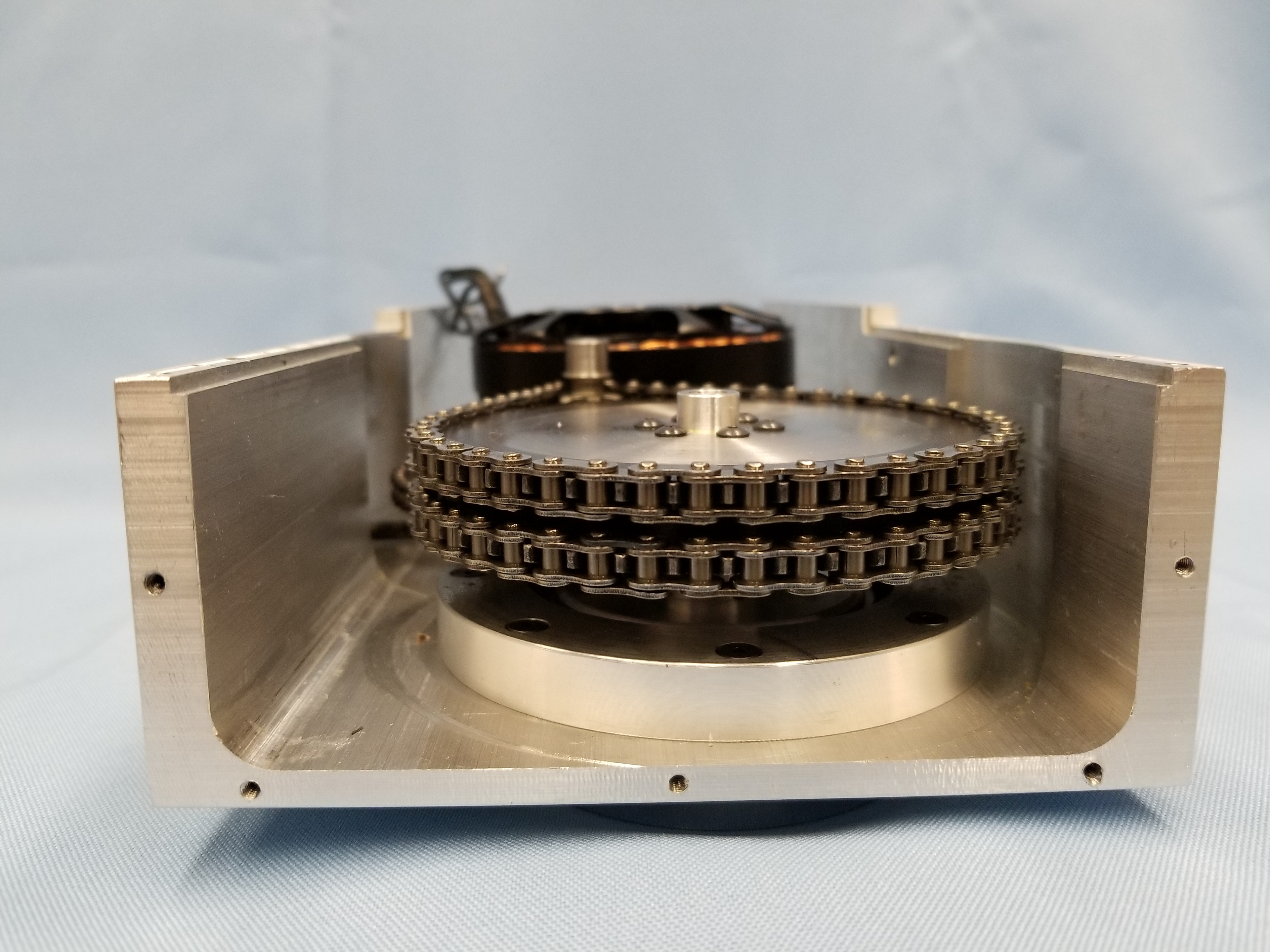
Custom Chain Drive Mechanism

Front and Rear Hip Joints

Front and Rear Leg Joints

Quadruped Prototype
Quadruped Prototype Testing