Providing powered joint actuation is a major focus of research in the lower-limb prosthesis area. The capability of actively powering the joints enables the prosthesis to meet the energetic requirements of locomotion, and thus provide higher performance in restoring the lost lower-limb functions in comparison with traditional passive prostheses. This research study presents the design and control of a powered ankle prosthesis. Through the design calculation, the prosthesis is able to provide a sufficient range of motion and torque capacity to support the locomotion of up to 100 Kg individual which is further validated from the human subject testing results.

SKILLS DEVELOPED
PROJECT MEDIA
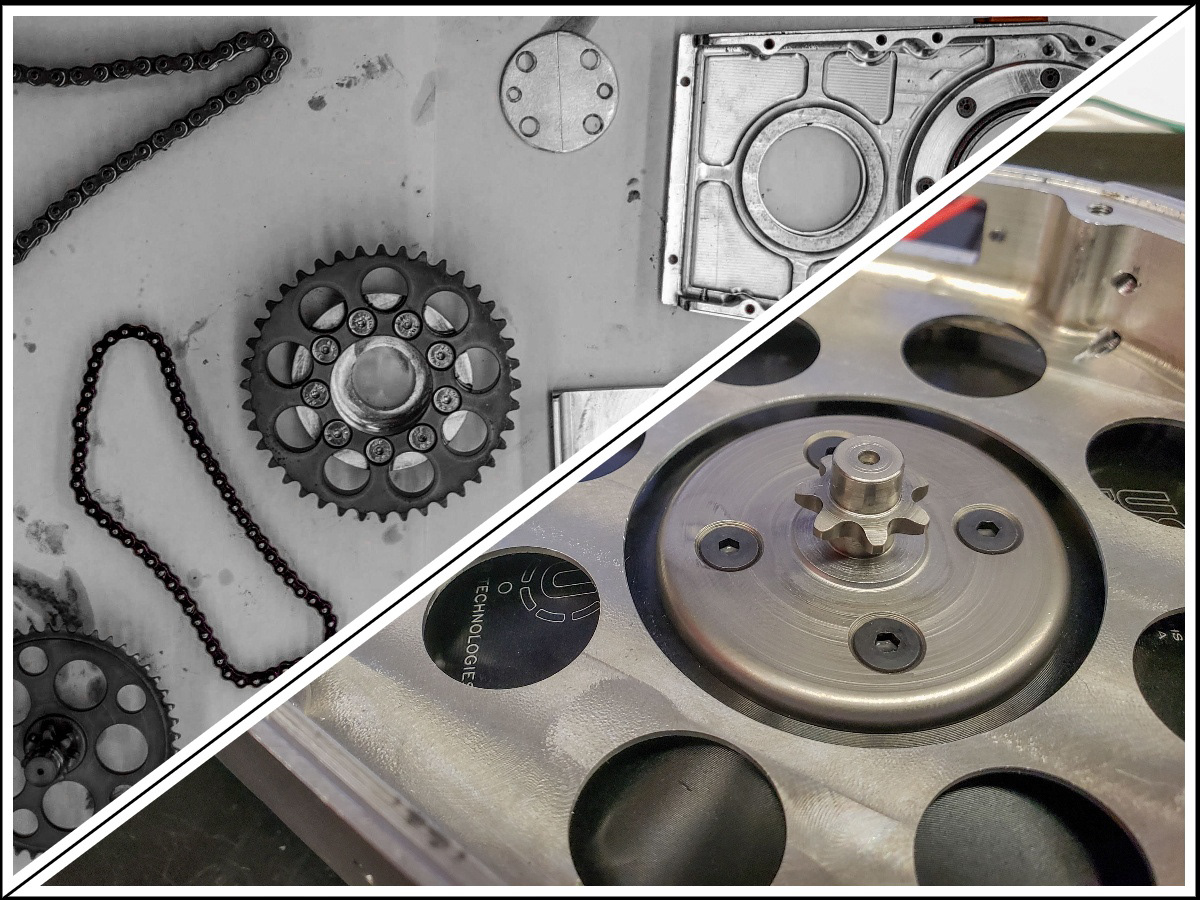
Custom Actuation Design

Prosthesis Assembly

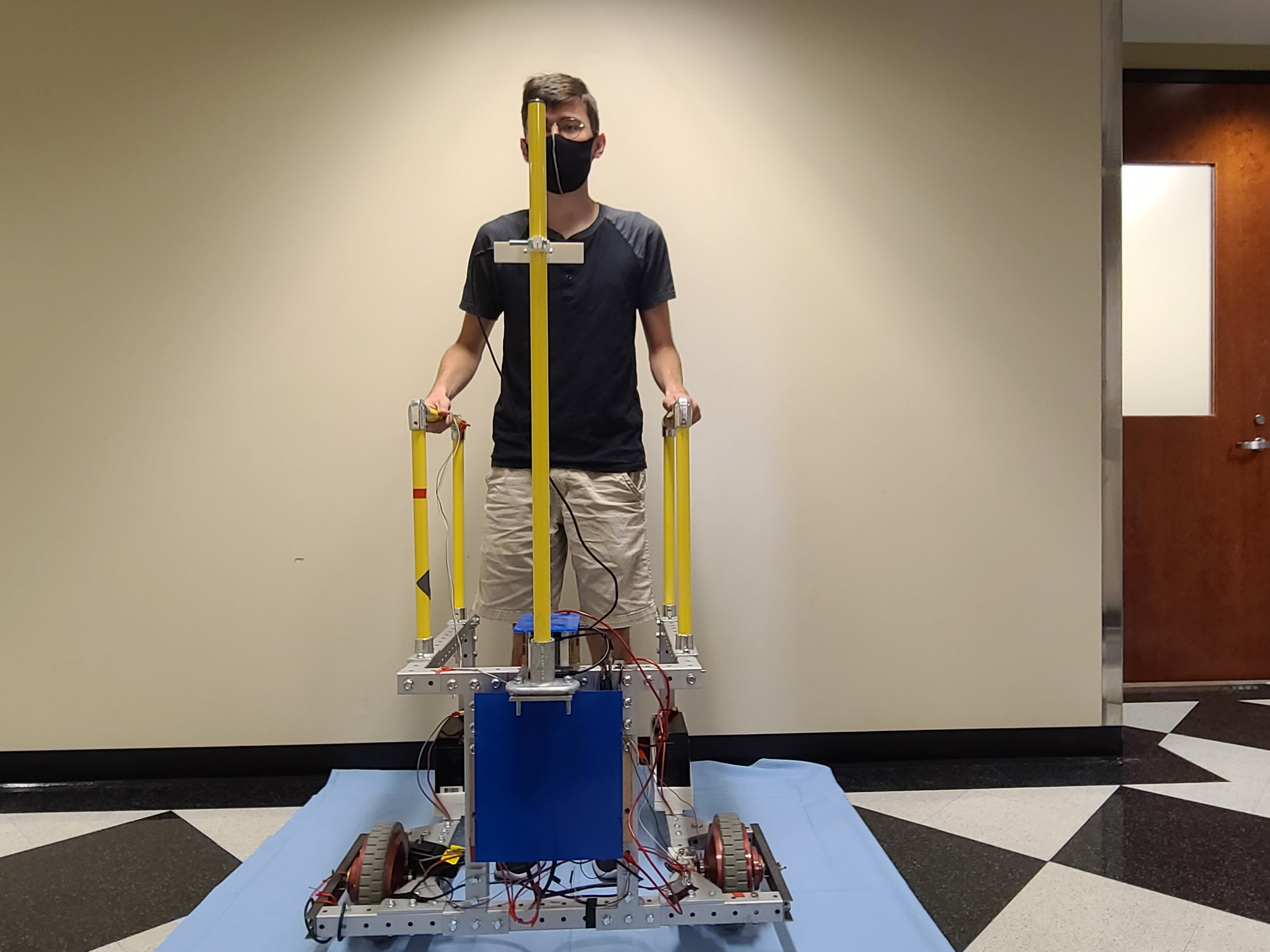
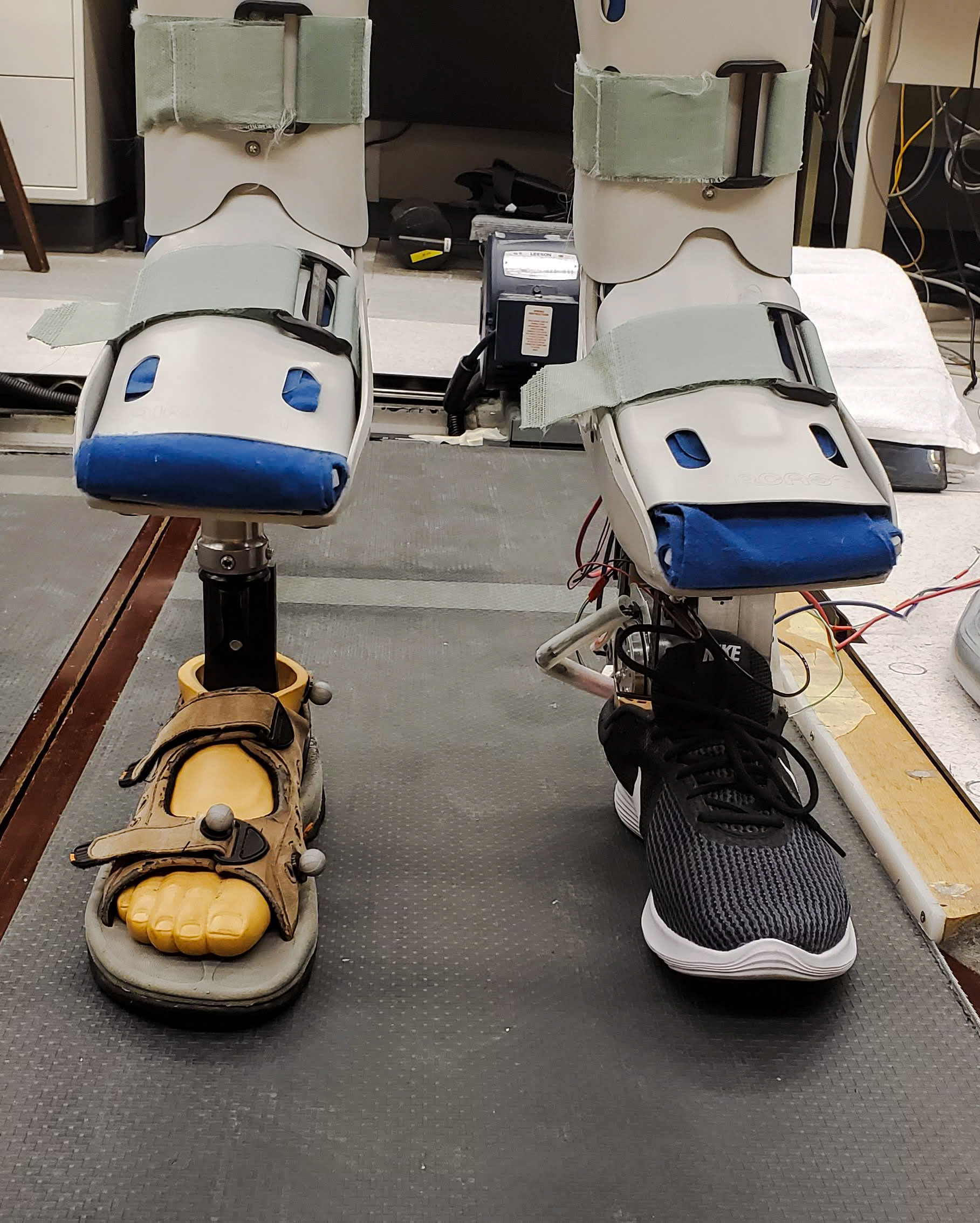
Benchtop Testing
Marker Placement

Biomechanical Evaluation